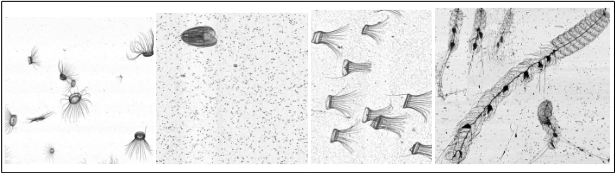
TPI浮游动物拖体影像仪采用水下光学扫描技术,捕获高分辨率的浮游动物原位剪影图像,如鱼卵及其它小型胶状生物,这些生物构成了海洋食物链的基础。
浮游动物拖体影像仪搭载在水下拖体上,研究者通过调查船以5节的速度拖行设备,实时采集水下生物的图像数据,用以连续原位观测浮游动物,持续时间可以从几小时到几周。研究范围从小型、高丰度的浮游生物到比较大的幼鱼等种类,也可以选配高速模块(10节速度)。仪器不仅配置拖体及相机系统,实时获取浮游生物的水下原位图像数据,也可以根据研究需要配置多种传感器,如CTD、叶绿素、溶解氧等,实现图像数据与环境监测参数数据的协同测定,对于进行综合性的生态调查、环境风险评估等工作具有重要意义。
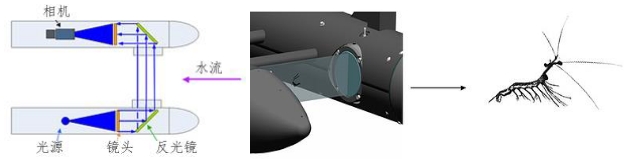
工作原理
TPI 浮游动物拖体影像仪基于背光摄影技术,采用阴影拍摄获取浮游生物的原位剪影图像数据。光源通过反射发出平行光柱,使光线充满整个图像区域,实现被拍摄生物的图像达到远心镜头效果:目标物的尺寸不会由于其在视野中的位置变化而改变其大小,图像没有放大及畸变,确保目标物以实际大小呈现。
TPI浮游动物拖体影像仪使用的是工业级的高精度远心镜头。为了拖曳采样需要,标准配备为线性扫描相机,可以获取监测水体的连续图像数据;如果用户需要进行水下站的固定位置监测或慢速垂向监测图像,也可以配备传统的区域扫描相机。
图像分辨率取决于成像面积(光学镜头尺寸)及相机分辨率。例如,使用13cm视野的镜头及2048分辨率相机获取的图像其像素分辨率约为63μm(13cm / 2048 pixels)。大多数情况下,图像分辨率需要达到10~15像素才能有效分
辨或识别出目标生物。因此,对于1毫米大小的水生生物,63μm的像素分辨率是辨识生物的合适选择。对于景深50cm视野13cm的镜头,在水中以5节的速度拖曳浮游动物原位图像系统,可以实现每秒167升水的滤水速度(2.57 m/sec×0.13m×0.50m = 167 L/sec)。
采用传统的区域扫描相机时,仍旧采用了相同的像素定义方式。不过,此时浮游动物拖体影像仪获取的图像为以固定间隔拍摄的延时图像。
标准的 TPI 图像:
14cm 高(2048 像素)的连续图像,50cm 景深(更高的分辨率可选)
35kHZ 线性扫描率,记录为 2kb×2kb 框图,约 18 帧/秒(70 kHZ 线性扫描率可选)
剪影图像,像素分辨率<70μm
有效滤水面积(5kts): 160L/sec(可以选择 10kts 速度匹配的镜头)
技术优势:
原位,高分辨率的未扰动样品图像,显示生物种类及空间的分布关系
线性扫描镜头技术,可以采集连续的图像信息,框图间无延时
专利的光学结构提供出色的50cm景深
大视野图像结合高船速,快速观察大体积水域
BellaMare拖体提供可选配置用于配合浮游动物拖体影像仪
超大负载能力可以搭载多种环境参数探头,实现图像数据与环境参数数据的同时采集
拖体动态可控,用于要求严苛的调查计划
电机光纤拖缆摆脱了传统的数据及能源传输限制
数据的实时显示及反馈控制可以实现自适应调查管理
TPI浮游动物拖体影像仪
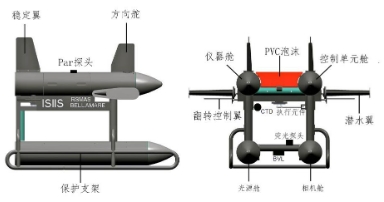
TPI系统包括镜头舱,甲板数据管理子系统和连接线缆。两个TPI水下舱体包含有镜头、光学器件、控制器及照明系统,适用水深200米。舱体定位于光学校准,防止水流扰动样品,影响成像质量。
甲板单元站提供能源、系统控制、数据存储(速度达到80mb/s)功能。图像数据存储区于可扩展的RAID硬盘内。电机光纤拖缆提供甲板单元与水下拖体间的连接。
双图像系统
TPI 浮游动物拖体影像仪标配的相机为视野 13cm、景深 50cm,适合于对大体积水域进行监测,通常拍摄体积大于1mm 的稀有生物种群。很多情况下,体积较小的种群其丰度较高,为了获取此类种群生物的高分辨率图像数据,需
要采用视野和景深更小的相机。此时,用户可选配微型相机系统(60 mm FOV×85 mm FOV,45μm 像素),实现双相甲板控制单元
机采集数据。双相机系统采集不同大小的浮游生物图像数据,可以用于观察或评价不同生物种群间的相互关系(例如捕食关系)。
双系统图像数据也可简化图像数据的分析及分类工作。可以使用微型相机采集的高分辨率图像研究体积较小、丰度较大的种群,而不用再利用标准相机对相同种群获取的低分辨率图像。
BellaMare 拖体
拖体采用模块化设计,根据需要更改配置,满足不同的负载需要,既可以实现在预定深度范围内的完全动态的波动飞行控制,避免船体尾波影响,也可以仅是被动拖曳。
TPI-2 ROTV 型拖体,是*先进的主动型水下拖曳载体平台,良好的设计有效减少了环境因素对拍摄过程的干扰,尤为重要的是,此拖体具有预编程能力,可以实现按用户预定深度进行水下波动飞行,或按设定的海拔高度随着海底轮廓而运动。
TPI-2 ROTV型拖体提供了不同深度水中生物分布的良好刻度辨识率,其流体动力学设计有效减少了影响图像分辨率的振动,提供了接近完全无扰动的浮游生物原位观察功能。
TPI-1 ROTV型拖体是一个被动型水下载体平台,其释放深度及运行轨迹完全取决于系于其上的绞车电缆。其可搭载与TPI-2 ROTV型拖体完全相同的拍摄系统及环境探头。
Bella Mare 集成系统
拖体可以根据需要装配许多环境参数探头,整合为一套环境参数综合监测系统,补充 TPI 浮游生物图像系统或其它调查设备的应用。目前可集成的探头包括 CTD、叶绿素、溶解氧、Par、透射率等探头。
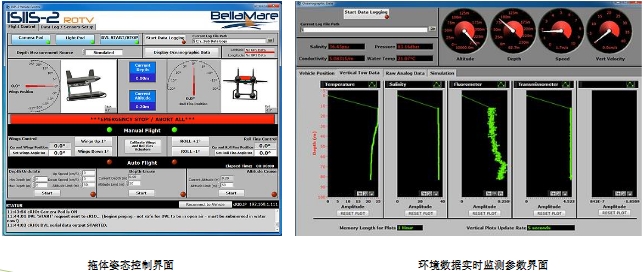
软件
BellaMare 拖体控制软件,采用便捷的图像控制界面,可以实现环境参数实时监测及拖体的飞行控制。所有的原始数据通过单模式光纤导缆及时地传输到甲板控制单元,系统软件可以实现数据采集、图像记录、拖体状态显示及控
制功能。